Moco
MoCo
文章标题:Momentum Contrast for Unsupervised Visual Representation Learning
作者:Kaiming He, Haoqi Fan, Yuxin Wu, Saining Xie, Ross Girshick
发表时间:(CVPR 2020)
视觉 + 对比学习的里程碑式的工作
无监督学习的目的:在一个很大的无标注的数据集上训练,模型学到的特征可以很好的迁移到下游任务。
对比学习:通过对比去学习模型,只需要知道图 A和 图 B相似,图 A、图 B和 图 C不相似;而不需要真的知道各个图片的具体类别。
3 张图进入一个网络 M 得到特征 f1、f2、f3,在一个学习好的特征空间 embedding space 中,f1、f2 的特征尽量近,和 f3 的特征尽量远离。
对比学习学到的很好的特征:类似物体在这个特征空间 相邻,不类似的物体在特征空间 远离
Q: 图 1 和 图 2 相似,和图 3 都不相似,难道不是有监督学习吗?Why 对比学习在 CV 领域被认为是无监督训练呢?
CV 领域 设计巧妙的代理任务 pre-text task,人为设立一些规则 —— 定义哪些图片相似、哪些图片不相似,为自监督学习提供监督信号,从而自监督训练
一个无标注的数据集,n 张图片,$x_1, x_2, …, x_n$, 随机选取一张图片,做 transformation。
以 $x_1 $图片为例,$x_1 $随机裁剪 + 数据增广 得到 $x_i^1$, $x_i^2 $(看起来和 $x_1$ 有区别的 2 张照片, $x_1$ 的正样本),数据集中的其它图片 $x_j$, $j ≠ i $是 $x_1$ 的负样本
基于图片和图片本身的变换是正样本,和其它图片是负样本
ImageNet-1K 此时不是 1000 个类别,而是 100w 个类别。每个图片都是它自己的正样本,其余都是负样本。
对比学习的框架:灵活性–定义正负样本的规则
- 同一个视频里的任意两帧是正样本,和其它视频的所有帧是负样本
- NLP, simCSE 把同样的句子扔给模型,但是做 2 次 forward,通过不同的 dropout 得到一个句子的 2 个特征;和其它所有句子的特征都是负样本。
- CMC 论文:一个物体的不同视角 view(正面、背面;RGB 图像、深度图像)作为不同形式的正样本。
- 多模态领域:Open AI 的 CLIP 模型
MoCo标题
Momentum Contrast for Unsupervised Visual Representation Learning
动量对比学习的方法做无监督视觉特征学习
Momentum Contrast: 动量对比学习
动量:(指数)加权移动平均值 $y_t = m * y_{t-1} + (1 - m) * x_t$
m: 动量的超参数
$y_{t-1}$: 上一个时刻的输出
$x_t$: 当前时刻的输入
m 趋近于 1,$y_t $改变缓慢,当前时刻的输入 $x_t $没什么影响
m 趋近于 0, $y_t $更多依赖于当前时刻的输入。
MoCo 利用动量的特性,缓慢的更新一个编码器,从而让中间学习到的字典中的特征尽可能保持一致。
MoCo 从什么角度做对比学习呢?
dictionary look-up, 字典查询任务, a dynamic dictionary with a queue and a moving-averaged encoder 动态字典
- 一个队列:队列中的样本无需梯度回传,可以放很多负样本,让字典变得很大
- 一个移动平均的编码器:让字典的特征尽可能的保持一致
- 一个大的、一致的字典,有利于无监督的对比学习训练。
Introduction
NLP 的离散单词更具语义性,CV的连续、高维信号不好构建字典
无监督在 CV 不成功的原因是什么?
原始信号空间的不同
NLP 原始信号是离散的,词、词根、词缀,容易构建 tokenized dictionaries 做无监督学习
tokenized: 把一个词对应成某一个特征
Why tokenized dictionaries 有助于无监督学习?
- 把字典的 key 认为是一个类别,有类似标签的信息帮助学习
- NLP 无监督学习很容易建模,建好的模型也好优化
- CV 原始信号是连续的、高维的,不像单词具有浓缩好的、简洁的语义信息,不适合构建一个字典
- 如果没有字典,无监督学习很难建模
给CV 无监督对比学习 构建一个 ==大 (by queue)==+ ==一致 (momentum encoder)==的字典
$f_{11} $当成 query 在 $f_{12}, f_2, f_3, …, f_n$ 组成的字典的 key 特征条目 $k_1, k_2, …$ 里面查找,dictionary look-up 靠近 $f_{12}$, 远离 $f_2, f_3, …$
从动态字典的角度看对比学习,什么样的字典才适合呢? 大 + 一致性
large
从连续高维空间做更多的采样。字典 key 越多,表示的视觉信息越丰富,匹配时更容易找到具有区分性的本质特征。
如果 字典小、key 少,模型可能学到 shortcut 捷径,不能泛化
consistent
字典里的 key ($k_0, k_1, k_2, …, k_N$) 应该由相同的 or 相似的编码器生成
如果字典的 key 是由不同的编码器得到的,query q 做字典查询时,很有可能 找到和 query 使用同一个 or 相似编码器生成的 key,而不是语义相似的 key。另一种形式的 shortcut solution
Related work
两个可以做的点:pretext tasks and loss functions
- 代理任务:为了学习一个好的数据特征表示
- 损失函数:和代理任务可以分开研究。 MoCo 的创新点在损失函数,又大又一致的字典 影响 infoNCE 目标函数的计算
损失函数:判别式、生成式、对比学习、对抗学习
对比学习的损失:目标不固定,训练过程中不断改变。目标有编码器抽出来的特征(MoCo 的字典)而决定
判别式:预测 8 个位置中的哪一个方位(九宫格)
生成式:重建整张图
对比学习的目标:测量样本对 在特征空间的相似性。相似样本离得近,不相似样本离得远
对抗学习的目标:衡量两个概率分布之间的差异
对比学习和代理任务的关系:
- 不同的代理任务 可以和 某种形式的对比学习的目标函数 配对使用
- Instance discrimination 个体判别方法 —– examplar based 代理任务很相关
- CPC contrastive predictive coding 用上下文信息预测未来 —– context auto-encoding 上下文自编码
- CMC contrastive multiview coding 利用一个物体的不同视角做对比 —– olorization 图片上色(同一个图片的 2 个视角:黑白 和 彩色)
Methods
对比学习和最近的发展,都可以看成是一个训练一个 encoder 来做 字典查询 的任务
$$ L_q=-log\ \frac{exp(q\cdot k_+ / \tau)}{\sum_{i=0}^K exp(q\cdot k_i / \tau)} $$q : 编码查询,;${k_0, k_1, k_2, …}$: 一组键 key 编码样本 。假设字典中只有一个键$(k_+)$与 q 匹配。
$\tau$: 温度超参数; K : 负样本个数。
试图将 q 分类为 k+ 的 (K+1)-way softmax-based 分类器的对数损失。
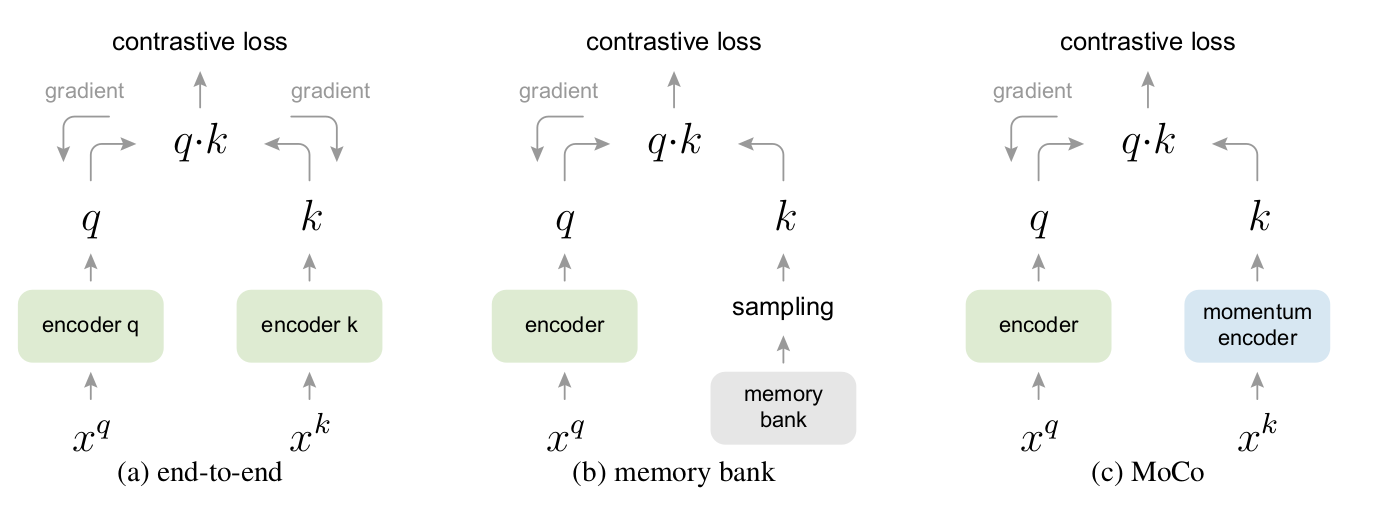
end to end: 编码器都能通过反向传播实时更新学习。(特征高度一致)
局限性:字典大小 == mini-batch size 硬件限制;大 batch size 优化难,难收敛
memory bank: 只有query 编码器可以进行梯度回传更新。 把所有特征存在memory bank里, 从memory bank中随机抽取 key 当作字典;没有反向传播,所以它可以支持大的字典大小。
局限性:不同时刻编码器(梯度回传更新)得到的特征缺乏一致性
MoCo: 采用队列形式实现一个字典( 不受batch size限制 ),使用动量编码器(提高一致性)
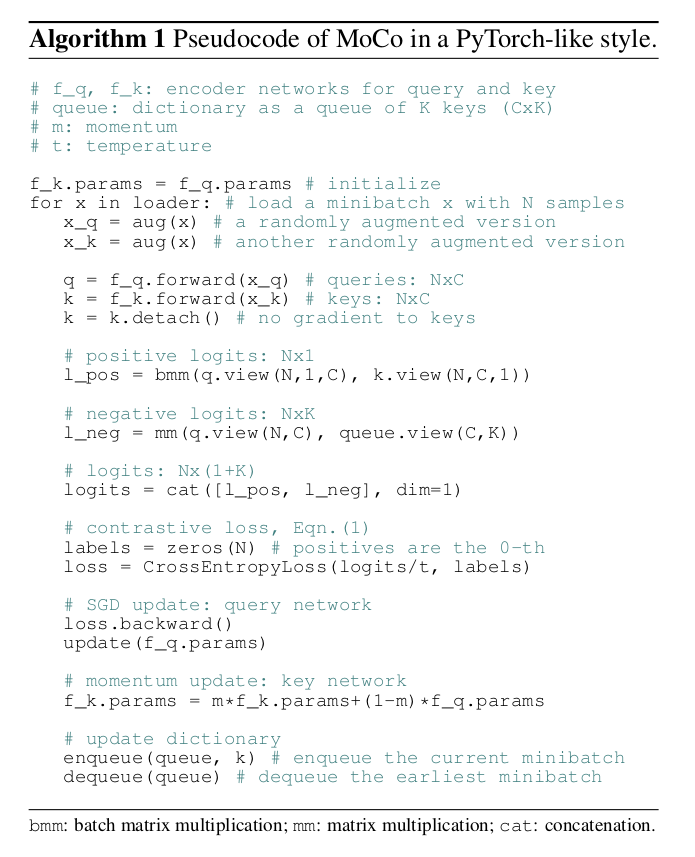
queue 数据结构: 剥离字典的大小 和 显卡内存的限制,让字典的大小和模型每次做前向传播的 batch size 的大小分开
当前 mini-batch 入队,最早进入队列的 mini-batch 出队
队列的大小 == 字典的大小,但是每次做 iteration 更新,并不需要更新字典中所有 key 元素的值。
momentum encoder:使用 queue,只有当前 mini-batch 的特征是由当前的编码器得到的;之前的 key 是由不同时刻的编码器抽取的特征,如何保持 consistent 呢?
momentum encoder 由当前时刻的 encoder 初始化而来
$\theta_k = m * \theta_{k-1}+ (1-m) * \theta_q$
动量系数: $m\in[0,1)$。只有参数 θq 通过反向传播更新。
动量参数 m 较大时,$\theta_k $的更新缓慢,不过多的依赖于 $\theta_q $当前时刻的编码器,即不随着当前时刻的编码器快速改变,尽可能保证 字典里的 key 都是由相似的编码器生成的特征,保证特征的 consistent
Shuffling BN
小 trick ,后续没再用
BN会阻止模型学习好的表征,可能是由于样本中间的信息(由BN引起)泄露。
操作:配给GPU之前打乱样本顺序,用多个GPU进行训练,并对每个GPU的样本独立进行BN。再把顺序恢复后算loss。
拓展阅读
MoCo-V2
文章标题:Improved Baselines with Momentum Contrastive Learning
作者: Xinlei Chen, Haoqi Fan, Ross Girshick, Kaiming He
发表时间: (Arxiv 2021) 技术报告 (2页)
MoCo v2发现SimCLR里的那些技术都是即插即用型的,引入了mlp projection head以及使用更多的数据增强,就又刷新ImageNet 上的最好成绩。
加了一个 mlp 层
没有 batch norm ;直接 fc + Relu + fc + Relu
加了更多的数据增强
训练的时候用了cosine的 learning rate schedule
训练更长的 epoch,从200变到了800
MoCo-V3
文章标题:An Empirical Study of Training Self-Supervised Vision Transformers
作者: Xinlei Chen, Saining Xie, Kaiming He
发表时间: (ICCV 2021)
MoCo v2 + SimSiam
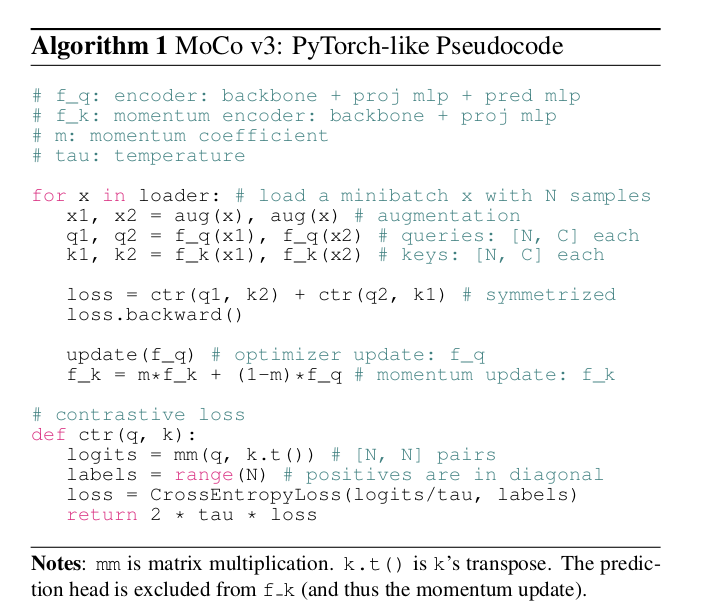
残差网络换成 ViT
当这个 batch size 变大了以后曲线会抖动,效果变差 方法:观察了一下训练时,每一层这个回传梯度的情况;发现每次 loss 有大幅震动 导致这个准确度大幅下降的时候,梯度也会有一个波峰(发生在第一层)
第一层:patch projection 解决:随机初始化了一个 patch projection 层;然后冻结使得整个训练过程中都不变